AGD
Adpative step-size
Considering a cost functional with the same characteristics as the one used for the GD case, then
augment the hyperFunGD
classby implementing some adpative step-size methods:Cauchy step-size.
Barzilai-Borwein (BB), all three versions.
Cauchy-BB.
When solving the GD simulation, the following classes / routines were considered
class
ss(step-size)
from enum import Enum, IntEnum, unique
@unique class ss(Enum): Cte = (0, 'Cte step-size') Cauchy = (1, 'Cauchy') CauchyLagged = (2, 'Cauchy-BB (lagged)') BBv1 = (6, 'BBv1') BBv2 = (7, 'BBv2') BBv3 = (8, 'BBv3') def __init__(self, val, txt): self.val = val self.txt = txt @classmethod def printSS(cls): for k in cls: print('ss.{}:'.format(k.name), k.val, k.txt)
class
hyperFun
Given the cost functional \(\displaystyle f(\mathbf{u}) = 0.5\| \Phi \mathbf{u} - \mathbf{b} \|_2^2 \) the Cauchy step-size is computed via (among others, see [Yua08])
where \(\mathbf{g} = \nabla f(\mathbf{u})\).
Given the cost functional \(\displaystyle f(\mathbf{u})\) and the vectors \(\mathbf{s}_k\) and \(\mathbf{y}_k\), where \( \begin{array}{ll} \bullet & \mathbf{s}_k = \mathbf{u}_k - \mathbf{u}_{k-1}. \\ \bullet & \mathbf{y}_k = \mathbf{g}_k - \mathbf{g}_{k-1}. \\ \bullet & \mathbf{u}_k \mbox{ is the solution at iteration }k. \\ \bullet & \mathbf{g}_k =\nabla f(\mathbf{u}_k) \end{array} \)
This method is also called Cauchy ``lagged’’: Given the cost functional \(\displaystyle f(\mathbf{u})\) and initial solution \(\mathbf{x}_0\), then (see [RS02])
\(\begin{array}{l} \mbox{for } k = 0,\,1,\, \ldots \\ \begin{array}{lll} & \mbox{if } REM(\,(k,\,2) == 0 & \end{array} \\ \begin{array}{lll} & & \alpha_k = \alpha_{k}^{\mbox{C}} \qquad\qquad{\color{lightgray} \mbox{ Cauchy step-size}} \\ \end{array} \\ \begin{array}{lll} & \mbox{else} \end{array} \\ \begin{array}{lll} & & \alpha_k = \alpha_{k\mbox{-}1} \qquad\qquad{\color{lightgray} \mbox{BB}} \\ \end{array} \\ \begin{array}{lll} & \\ & \mathbf{x}_{k\mbox{+}1} = \mathbf{x}_{k} - \alpha_k \nabla \mathbf{f}_{k} \\ \end{array} \\ \end{array} \)
Proposed solution
Among other pausible alternatives, and assuming the optimization problem is given by \(F(\mathbf{u}_k) = f( \mbox{fwOp}(\mathbf{u}_k), b)\), where
g: variable that represents \(\mathbf{g}_k = \nabla F(\mathbf{u}_k)\),self.fwOp(g)computes \(f( \mbox{fwOp}(\mathbf{g}_k), b)\),
the considered adaptive step-size methods may be written as
def ssCauchy(self, u, alpha, k, g):
num = g.ravel().dot( g.ravel() )
z = self.fwOp(g)
return num/z.ravel().dot( z.ravel() )
def ssBBv1(self, u, alpha, k, g):
if k == 0: # Cauchy randSol
self.uPrv = u.ravel().copy()
self.gPrv = g.ravel().copy()
num = g.ravel().dot( g.ravel() )
z = self.fwOp(g)
self.alphaBBv1 = num/z.ravel().dot( z.ravel() )
else:
s = u.ravel() - self.uPrv
y = g.ravel() - self.gPrv
self.alphaBBv1 = s.dot(s) / s.dot(y)
self.uPrv = u.ravel().copy() # records previous solution
self.gPrv = g.ravel().copy()
return self.alphaBBv1
def ssBBv2(self, u, alpha, k, g):
if k == 0: # Cauchy randSol
self.uPrv = u.ravel().copy()
self.gPrv = g.ravel().copy()
num = g.ravel().dot( g.ravel() )
z = self.fwOp(g)
self.alphaBBv2 = num/z.ravel().dot( z.ravel() )
else:
s = u.ravel() - self.uPrv
y = g.ravel() - self.gPrv
self.alphaBBv2 = s.dot(y) / y.dot(y)
self.uPrv = u.ravel().copy() # records previous solution
self.gPrv = g.ravel().copy()
return self.alphaBBv2
def ssBBv3(self, u, alpha, k, g):
if k == 0: # Cauchy randSol
self.uPrv = u.ravel().copy()
self.gPrv = g.ravel().copy()
num = g.ravel().dot( g.ravel() )
z = self.fwOp(g)
self.alphaBBv3 = num/z.ravel().dot( z.ravel() )
else:
s = u.ravel() - self.uPrv
y = g.ravel() - self.gPrv
self.alphaBBv3 = np.sqrt( s.dot(s) / y.dot(y) )
self.uPrv = u.ravel().copy() # records previous solution
self.gPrv = g.ravel().copy()
return self.alphaBBv3
def ssCauchyLagged(self, u, alpha, k, g):
if np.remainder(k,2) == 0:
num = g.ravel().dot( g.ravel() )
z = self.fwOp(g)
self.alphaCL = num/z.ravel().dot( z.ravel() )
return self.alphaCL
Simulation
1. Generate input data
import numpy as np
# --- Data generation (N,M: user inputs)
# --------------------------------------
rng = np.random.default_rng()
A = rng.normal(size=[N,M])
D = np.sqrt(max(N,M))*np.diag( rng.random([max(N,M),]), 0)
A += D[0:N,0:M]
A /= np.linalg.norm(A,axis=0)
xOrig = np.random.randn(M,1)
b = A.dot(xOrig) + sigma*np.random.randn(N,1)
2. Load the optimization problem
# --- Optimization model
# --- (see "Parameters", "OptProb", "E.g. quadratic func."
# in the tabbed panel above)
# ---------------------------------------------------------
OptProb = hosgdFunQlin(A,b)
3. Select the adaptive step-size method
# --- It is assumed that class 'ss' is defined
# in file 'HoSGDdefs.py'
# --- (see "Parameters", "hyperFun", "class ss"
# in the tabbed panel above)
# ---------------------------------------------------------
import HoSGDdefs as hosgdDef
# --- hyperPars
# --- (see "Parameters", "hyperFun", "E.g."
# in the tabbed panel above)
# ---------------------------------------------------------
# Cte. SS:
hyperP = hosgdHyperFun(OptProb, ssPolicy=hosgdDef.ss.Cte)
# Cauchy SS:
hyperP_C = hosgdHyperFun(OptProb, ssPolicy=hosgdDef.ss.Cauchy)
# Cauchy BBv1 SS:
hyperP_BB1 = hosgdHyperFun(OptProb, ssPolicy=hosgdDef.ss.BBv1)
# Cauchy-BB SS:
hyperP_CBB = hosgdHyperFun(OptProb, ssPolicy=hosgdDef.ss.CauchyLagged)
# etc.
4. Execute GD + adaptive SS
# --- nIter, alpha0: user defined.
# --- OptProb: see #2 in the current list
# --- hyperP / ssPolicy: see #3 in the current list
# Cte. SS:
u, stats = hosgdGD(OptProb, nIter, alpha, hyperP)
# Cauchy SS:
u1, stats1 = hosgdGD(OptProb, nIter, alpha, hyperP_C)
# Cauchy BBv1:
u2, stats2 = hosgdGD(OptProb, nIter, alpha, hyperP_BB1)
# Cauchy-BB SS:
u3, stats3 = hosgdGD(OptProb, nIter, alpha, hyperP_CBB)
Full solution
HoSGDdefs.py
from enum import Enum, IntEnum, unique
@unique
class ss(Enum):
Cte = (0, 'Cte step-size')
Cauchy = (1, 'Cauchy')
CauchyLagged = (2, 'Cauchy-BB (lagged)')
BBv1 = (6, 'BBv1')
BBv2 = (7, 'BBv2')
BBv3 = (8, 'BBv3')
def __init__(self, val, txt):
self.val = val
self.txt = txt
@classmethod
def printSS(cls):
for k in cls:
print('ss.{}:'.format(k.name), k.val, k.txt)
HoSGDL2gd.py
import numpy as np
import scipy as sc
from scipy import signal
import matplotlib.pylab as PLT
import HoSGDdefs as hosgdDef
from HoSGDdefs import hosgdOptProb
class hosgdHyperFun(object):
r"""Class related to routines associated to hyperPars computation
"""
def __init__(self, OptProb, ssPolicy=hosgdDef.ss.Cte):
self.ssPolicy = ssPolicy
self.fwOp = OptProb.fwOp
self.SS = self.sel_SS()
def sel_SS(self):
switcher = {
hosgdDef.ss.Cte.val: self.ssCte,
hosgdDef.ss.Cauchy.val: self.ssCauchy,
hosgdDef.ss.CauchyLagged.val: self.ssCauchyLagged,
hosgdDef.ss.BBv1.val: self.ssBBv1,
hosgdDef.ss.BBv2.val: self.ssBBv2,
hosgdDef.ss.BBv3.val: self.ssBBv3,
}
ssFun = switcher.get(self.ssPolicy.val, "nothing")
func = lambda u, alpha, k, g: ssFun(u, alpha, k, g)
return func
# --- === ---
def ssCte(self, u, alpha, k, g):
return alpha
def ssCauchy(self, u, alpha, k, g):
num = g.ravel().dot( g.ravel() )
z = self.fwOp(g)
return num/z.ravel().dot( z.ravel() )
def ssCauchyLagged(self, u, alpha, k, g):
if np.remainder(k,2) == 0:
num = g.ravel().dot( g.ravel() )
z = self.fwOp(g)
self.alphaCL = num/z.ravel().dot( z.ravel() )
return self.alphaCL
def ssBBv1(self, u, alpha, k, g):
if k == 0: # Cauchy randSol
self.uPrv = u.ravel().copy()
self.gPrv = g.ravel().copy()
num = g.ravel().dot( g.ravel() )
z = self.fwOp(g)
self.alphaBBv1 = num/z.ravel().dot( z.ravel() )
else:
s = u.ravel() - self.uPrv
y = g.ravel() - self.gPrv
self.alphaBBv1 = s.dot(s) / s.dot(y)
self.uPrv = u.ravel().copy() # records previous solution
self.gPrv = g.ravel().copy()
return self.alphaBBv1
def ssBBv2(self, u, alpha, k, g):
if k == 0: # Cauchy randSol
self.uPrv = u.ravel().copy()
self.gPrv = g.ravel().copy()
num = g.ravel().dot( g.ravel() )
z = self.fwOp(g)
self.alphaBBv2 = num/z.ravel().dot( z.ravel() )
else:
s = u.ravel() - self.uPrv
y = g.ravel() - self.gPrv
self.alphaBBv2 = s.dot(y) / y.dot(y)
self.uPrv = u.ravel().copy() # records previous solution
self.gPrv = g.ravel().copy()
return self.alphaBBv2
def ssBBv3(self, u, alpha, k, g):
if k == 0: # Cauchy randSol
self.uPrv = u.ravel().copy()
self.gPrv = g.ravel().copy()
num = g.ravel().dot( g.ravel() )
z = self.fwOp(g)
self.alphaBBv3 = num/z.ravel().dot( z.ravel() )
else:
s = u.ravel() - self.uPrv
y = g.ravel() - self.gPrv
self.alphaBBv3 = np.sqrt( s.dot(s) / y.dot(y) )
self.uPrv = u.ravel().copy() # records previous solution
self.gPrv = g.ravel().copy()
return self.alphaBBv3
# ===========================================
class hosgdFunQlin(hosgdOptProb):
r""" 0.5|| Au - b ||_2^2
"""
def __init__(self, A, b, gNormOrd=2, Nstats=4, verbose=10, initSol=None):
self.A = A
self.b = b
self.gNormOrd = gNormOrd
self.Nstats = Nstats
self.verbose = verbose
self.initSol = initSol # if not None --> reproducible initial solution
# ---------
# ---------
def costFun(self, u):
return 0.5*np.linalg.norm( self.A.dot(u).ravel()-self.b.ravel(), ord=2)**2
# ---------
def fwOp(self, u):
return self.A.dot(u)
# ---------
def gradFun(self, u):
return self.A.transpose().dot(self.A.dot(u) - self.b)
# ---------
def randSol(self):
if self.initSol is None:
rng = np.random.default_rng()
else:
rng = np.random.default_rng(self.initSol)
return rng.normal(size=[self.A.shape[1],1])
# ---------
def computeStats(self, u, alpha, k, g):
cost = self.costFun(u)
gNorm = self.gradNorm(g, self.gNormOrd)
return np.array([k, cost, alpha, gNorm])
def printStats(self, k, nIter, v):
if k == 0:
print('\n')
if self.verbose > 0:
if np.remainder(k,self.verbose)==0 or k==nIter-1:
print('{:>3d}\t {:.3e}\t {:.2e} {:.2e}'.format(int(v[k,0]),v[k,1],v[k,2],v[k,3]))
return
def gradNorm(self, g, ord=2):
if g is None:
return -1.0
if ord == 2:
return np.linalg.norm(g.ravel(),ord=ord)**ord
else:
return np.linalg.norm(g.ravel(),ord=ord)
# ===========================================
def hosgdGD(OptProb, nIter, alpha0, hyperFun):
u = OptProb.randSol()
stats = np.zeros( [nIter, OptProb.Nstats] )
for k in range(nIter):
g = OptProb.gradFun(u)
alpha = hyperFun.SS(u, alpha0, k, g)
u = u - alpha*g
stats[k,:] = OptProb.computeStats(u, alpha, k, g)
OptProb.printStats(k, nIter, stats)
return u, stats
def exQlin(nIter, alpha, N=1000, M=500, sigma=0.05, ssPolicy=hosgdDef.ss.Cte):
# Examples
# u, st = H.exQlin(40, np.array([0.05, 0.01, 0.001]), N=500, M=2000, ssPolicy=H.hosgdDef.ss.Cte)
# --- Data generation
# -------------------
rng = np.random.default_rng()
A = rng.normal(size=[N,M])
D = np.sqrt(max(N,M))*np.diag( rng.random([max(N,M),]), 0)
A += D[0:N,0:M]
A /= np.linalg.norm(A,axis=0)
xOrig = np.random.randn(M,1)
b = A.dot(xOrig) + sigma*np.random.randn(N,1)
# --- Optimization model
# ----------------------
OptProb = hosgdFunQlin(A,b)
# --- HyperPar
# ------------
if isinstance(ssPolicy, list):
u = []
stats = []
ssPlcyList = []
alphaList = []
for n in range(len(ssPolicy)):
hyperP = hosgdHyperFun(OptProb, ssPolicy=ssPolicy[n])
sol = hosgdGD(OptProb, nIter, alpha, hyperP)
u.append(sol[0])
stats.append(sol[1])
ssPlcyList.append( ssPolicy[n] )
alphaList.append(alpha)
stDict = {'stats': stats, 'ssPlcy': ssPlcyList, 'alphaVal': alphaList, 'alphaPlot':True}
plotGDDictStats(stDict)
else:
hyperP = hosgdHyperFun(OptProb, ssPolicy=ssPolicy)
# --- Call GD
# -----------
u, stats = runGD(OptProb, nIter, alpha, hyperP, ssPolicy)
return u, stats
def runGD(OptProb, nIter, alpha, hyperP, ssPolicy):
if hasattr(alpha, "shape"):
u = []
stats = []
ssPlcyList = []
for n in range(alpha.shape[0]):
sol = hosgdGD(OptProb, nIter, alpha[n], hyperP)
u.append(sol[0])
stats.append(sol[1])
if isinstance(ssPolicy, list):
ssPlcyList.append( ssPolicy[n] )
flagAlphaPlot = True
else:
ssPlcyList.append( ssPolicy )
flagAlphaPlot = False
stDict = {'stats': stats, 'ssPlcy': ssPlcyList, 'alphaVal': alpha, 'alphaPlot':flagAlphaPlot}
plotGDDictStats(stDict)
else:
u, stats = hosgdGD(OptProb, nIter, alpha, hyperP)
plotGDStats(stats, ssPolicy)
return u, stats
def plotGDStats(stats, ssPolicy):
# --- Plot results ---
PLT.figure()
PLT.plot(stats[:,1], label=r'$\alpha_k$ : {0}'.format(ssPolicy.txt) )
PLT.legend(loc='upper right')
PLT.ylabel(r'$f(x) = \frac{1}{2}\| A \mathbf{x} - \mathbf{b} \|_2^2$', fontsize=16)
PLT.xlabel('Iteration', fontsize=16)
if ssPolicy.val > 0:
PLT.figure()
PLT.plot(stats[1::,2], label=r'$\alpha_k$ : {0}'.format(ssPolicy.txt) )
PLT.legend(loc='upper right')
PLT.ylabel(r'$\alpha$', fontsize=20)
PLT.xlabel('Iteration', fontsize=16)
PLT.show()
def plotGDDictStats(stDict):
stats = stDict.get('stats')
ssPlcy = stDict.get('ssPlcy')
alpha = stDict.get('alphaVal')
alphaPlot = stDict.get('alphaPlot')
# --- Plot cost function ---
PLT.figure()
for n in range(len(stats)):
PLT.semilogy(stats[n][:,1], label=r'$\alpha_k$ : {0} -- {1}'.format(alpha[n], ssPlcy[n].txt) )
PLT.legend(loc='upper right')
PLT.ylabel(r'$f(x) = \frac{1}{2}\| A \mathbf{x} - \mathbf{b} \|_2^2$', fontsize=16)
PLT.xlabel('Iteration', fontsize=16)
PLT.title('Cost functional',fontsize=16)
# --- Plot SS ---
if alphaPlot:
PLT.figure()
for n in range(len(stats)):
PLT.plot(stats[n][1::,2], label=r'$\alpha_k$ : {0}'.format(ssPlcy[n].txt) )
PLT.legend(loc='upper right')
PLT.ylabel(r'$\alpha$', fontsize=20)
PLT.xlabel('Iteration', fontsize=16)
PLT.title('Step-size',fontsize=16)
# ---
# --- Plot gradNorm ---
if False:
PLT.figure()
for n in range(len(stats)):
PLT.semilogy(stats[n][1::,3], label=r'$\alpha_k$ : {0}'.format(ssPlcy[n].txt) )
PLT.legend(loc='upper right')
PLT.ylabel(r'$\| \nabla F \|_2$', fontsize=20)
PLT.xlabel('Iteration', fontsize=16)
PLT.title('Gradient norm',fontsize=16)
# ---
PLT.show()
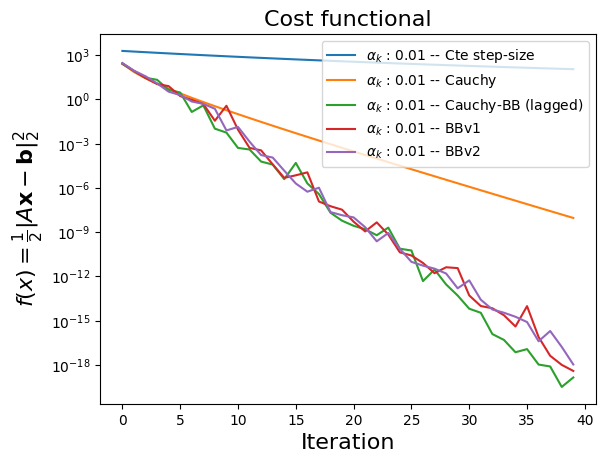
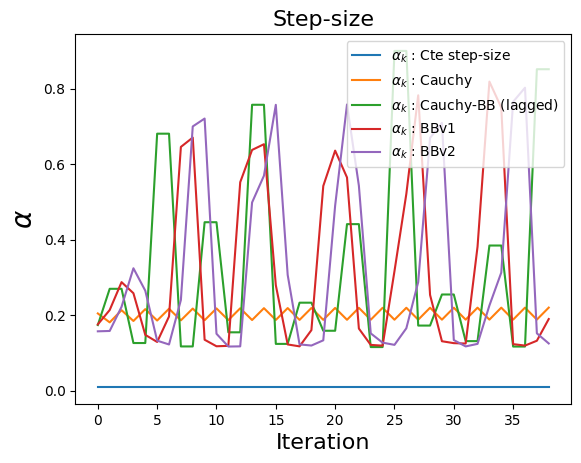
Simple Simulation
import numpy as np
import HoSGDlabGD as H
import HoSGDdefs as hosgdDef
# set different ssPolicies
ssPolicy = []
ssPolicy.append( hosgdDef.ss.Cte )
ssPolicy.append( hosgdDef.ss.Cauchy )
ssPolicy.append( hosgdDef.ss.CauchyLagged )
ssPolicy.append( hosgdDef.ss.BBv1 )
ssPolicy.append( hosgdDef.ss.BBv2 )
u, st = H.exQlin(40, 0.01, N=500, M=2000, ssPolicy=ssPolicy)
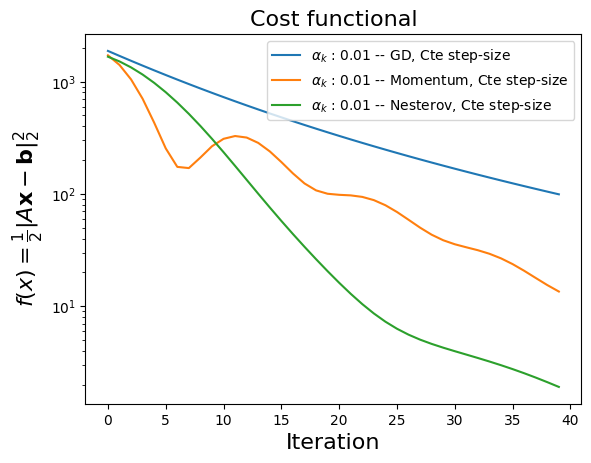
Accelerted GD: Momentum & Nesterov
Given the cost functional \(\displaystyle F(\mathbf{u}) = f(\mbox{Op}(\mathbf{u}), \mathbf{b}) \) and parameter \(\gamma\) then
Given the cost functional \(\displaystyle F(\mathbf{u}) = f(\mbox{Op}(\mathbf{u}), \mathbf{b}) \) and the inertial sequence \(\{ \gamma_k \}\) then
Proposed solution
Among other pausible alternatives, the considered accelerated GD algorithms may be written as
Highlighted lines point out the differences between GD and Momentum [Pol64].
def hosgdMTM(OptProb, nIter, alpha0, hyperFun):
u = OptProb.randSol()
z = 0*u
stats = np.zeros( [nIter, OptProb.Nstats] )
for k in range(nIter):
g = OptProb.gradFun(u)
alpha = hyperFun.SS(u, alpha0, k, g)
z = hyperFun.mtmGamma*z - alpha*g
u = u + z
stats[k,:] = OptProb.computeStats(u, alpha, k, g)
OptProb.printStats(k, nIter, stats)
return u, stats
Highlighted lines point out the differences between GD and Nesterov [Nes83].
def hosgdNTRV(OptProb, nIter, alpha0, hyperFun):
u1 = OptProb.randSol()
y = u1.copy()
stats = np.zeros( [nIter, OptProb.Nstats] )
for k in range(nIter):
g = OptProb.gradFun(y)
alpha = hyperFun.SS(u1, alpha0, k, g)
gamma = hyperFun.ISeq(k)
u0 = u1.copy()
u1 = y - alpha*g
y = u1 + gamma*(u1 - u0)
stats[k,:] = OptProb.computeStats(u1, alpha, k, g)
OptProb.printStats(k, nIter, stats)
return u1, stats
def hosgdMTM(OptProb, nIter, alpha0, hyperFun):
def hosgdNTRV(OptProb, nIter, alpha0, hyperFun):
OptProb
Blah, blahnIter
alpha0
hyperFun
Blah, blahSimulation
1. Generate input data
import numpy as np
# --- Data generation (N,M: user inputs)
# --------------------------------------
rng = np.random.default_rng()
A = rng.normal(size=[N,M])
D = np.sqrt(max(N,M))*np.diag( rng.random([max(N,M),]), 0)
A += D[0:N,0:M]
A /= np.linalg.norm(A,axis=0)
xOrig = np.random.randn(M,1)
b = A.dot(xOrig) + sigma*np.random.randn(N,1)
2. Load the optimization problem
# --- Optimization model
# --- (see "Parameters", "OptProb", "E.g. quadratic func."
# in the tabbed panel above)
# ---------------------------------------------------------
OptProb = hosgdFunQlin(A,b)
3. Select the hyper-parameters routines
# --- It is assumed that class 'ss' is defined
# in file 'HoSGDdefs.py'
# --- (see "Parameters", "hyperFun", "class ss"
# in the tabbed panel above)
# ---------------------------------------------------------
import HoSGDdefs as hosgdDef
# --- hyperPars
# --- (see "Parameters", "hyperFun", "E.g."
# in the tabbed panel above)
# ---------------------------------------------------------
# Momentum case:
hyperPmtm = hosgdHyperFun(OptProb, ssPolicy=hosgdDef.ss.Cte, mtmGamma=0.9)
# Nesterov case:
hyperPntrv = hosgdHyperFun(OptProb, ssPolicy=hosgdDef.ss.Cte, iseqPolicy=hosgdDef.iseq.Ntrv)
4. Execute Momentum or Nesterov
# --- nIter, alpha0: user defined.
# --- OptProb: see #2 in the current list
# --- hyperP: see #3 in the current list
# Momentum case:
u1, stats1 = hosgdMTM(OptProb, nIter, alpha0, hyperPmtm)
# Nesterov case:
u2, stats2 = hosgdNTRV(OptProb, nIter, alpha0, hyperPntrv)
Full solution
HoSGDdefs.py
from enum import Enum, IntEnum, unique
@unique
class ss(Enum):
Cte = (0, 'Cte step-size')
Cauchy = (1, 'Cauchy')
CauchyLagged = (2, 'Cauchy-BB (lagged)')
CauchyRand = (3, 'Cauchy rand')
CauchySupp = (4, 'Cauchy supp')
CauchyLSupp = (5, 'Cauchy-BB supp')
BBv1 = (6, 'BBv1')
BBv2 = (7, 'BBv2')
BBv3 = (8, 'BBv3')
def __init__(self, val, txt):
self.val = val
self.txt = txt
@classmethod
def printSS(cls):
for k in cls:
print('ss.{}:'.format(k.name), k.val, k.txt)
@unique
class iseq(Enum):
Ntrv = (0, 'Standard ISeq')
Lin = (1, 'Linear ISeq')
GLin = (1, 'Generalized linear ISeq')
def __init__(self, val, txt):
self.val = val
self.txt = txt
@classmethod
def printLR(cls):
for k in cls:
print('iseq.{}:'.format(k.name), k.val, k.txt)
HoSGDL2agd.py
import numpy as np
import scipy as sc
from scipy import signal
import matplotlib.pylab as PLT
import HoSGDdefs as hosgdDef
from HoSGDlabGD import hosgdFunQlin, hosgdHyperFun, hosgdGD, plotGDDictStats
class hosgdHyperFunAGD(hosgdHyperFun):
r"""Class (child) related to routines associated to hyperPars computation
"""
def __init__(self, OptProb, ssPolicy=hosgdDef.ss.Cte, iseqPolicy=hosgdDef.iseq.Ntrv, mtmGamma=0.9, iseqPar1=2,iseqPar2=80):
self.ssPolicy = ssPolicy
self.iseqPolicy = iseqPolicy
self.fwOp = OptProb.fwOp
self.SS = self.sel_SS()
self.ISeq = self.sel_ISeq()
self.mtmGamma = mtmGamma
self.iseqPar1 = iseqPar1
self.iseqPar2 = iseqPar2
# --- === ---
hosgdDef.iseq.Ntrv.val: self.iseqNtrv,
hosgdDef.iseq.Lin.val: self.iseqLin,
hosgdDef.iseq.GLin.val: self.iseqGlin,
}
iseqFun = switcher.get(self.iseqPolicy.val, "nothing")
func = lambda k: iseqFun(k)
return func
# --- === ---
def iseqNtrv(self, k):
if k == 0:
self.t0 = 1.0
self.t1 = 0.5 * float(1. + np.sqrt(1. + 4. * self.t0**2.))
gamma = (self.t0-1.)/self.t1
self.t0 = self.t1
return gamma
def iseqLin(self, k):
gamma = ((k+1.)-1.)/( ((k+1.)-1.) + self.iseqPar1 + 1)
return gamma
def iseqGlin(self, k):
gamma = ((k+1.)-1. -(1+self.iseqPar1) + self.iseqPar2 )/((k+1.) + self.iseqPar1 )
return gamma
def hosgdMTM(OptProb, nIter, alpha0, hyperFun):
u = OptProb.randSol()
z = 0*u
stats = np.zeros( [nIter, OptProb.Nstats] )
for k in range(nIter):
g = OptProb.gradFun(u)
alpha = hyperFun.SS(u, alpha0, k, g)
z = hyperFun.mtmGamma*z - alpha*g
u = u + z
stats[k,:] = OptProb.computeStats(u, alpha, k, g)
OptProb.printStats(k, nIter, stats)
return u, stats
# ===========================================
def hosgdNTRV(OptProb, nIter, alpha0, hyperFun):
u1 = OptProb.randSol()
y = u1.copy()
stats = np.zeros( [nIter, OptProb.Nstats] )
for k in range(nIter):
g = OptProb.gradFun(y)
alpha = hyperFun.SS(u1, alpha0, k, g)
gamma = hyperFun.ISeq(k)
u0 = u1.copy()
u1 = y - alpha*g
y = u1 + gamma*(u1 - u0)
stats[k,:] = OptProb.computeStats(u1, alpha, k, g)
OptProb.printStats(k, nIter, stats)
return u1, stats
# ===========================================
def exQlinAGD(nIter, alpha, N=1000, M=500, sigma=0.05, ssPolicy=hosgdDef.ss.Cte, iseqPolicy=None, mtmGamma=None):
# Examples
#
# --- Data generation
# -------------------
rng = np.random.default_rng()
A = rng.normal(size=[N,M])
D = np.sqrt(max(N,M))*np.diag( rng.random([max(N,M),]), 0)
A += D[0:N,0:M]
A /= np.linalg.norm(A,axis=0)
xOrig = np.random.randn(M,1)
b = A.dot(xOrig) + sigma*np.random.randn(N,1)
# --- Optimization model
# ----------------------
OptProb = hosgdFunQlin(A,b)
# --- HyperPar
# ------------
if iseqPolicy is None and mtmGamma is None:
u = []
stats = []
ssPlcyList = []
algoList = []
# --- ___ ---
hyperP = hosgdHyperFun(OptProb, ssPolicy=ssPolicy)
sol = hosgdGD(OptProb, nIter, alpha, hyperP)
u.append(sol[0])
stats.append(sol[1])
ssPlcyList.append( ssPolicy )
algoList.append('GD')
# --- ___ ---
hyperP = hosgdHyperFunAGD(OptProb, ssPolicy=ssPolicy, mtmGamma=0.9)
sol = hosgdMTM(OptProb, nIter, alpha, hyperP)
u.append(sol[0])
stats.append(sol[1])
ssPlcyList.append( ssPolicy )
algoList.append('Momentum')
# --- ___ ---
hyperP = hosgdHyperFunAGD(OptProb, ssPolicy=ssPolicy, mtmGamma=0.9)
sol = hosgdNTRV(OptProb, nIter, alpha, hyperP)
u.append(sol[0])
stats.append(sol[1])
ssPlcyList.append( ssPolicy )
algoList.append('Nesterov')
stDict = {'stats': stats, 'ssPlcy': ssPlcyList, 'alphaVal': alpha, 'algoList': algoList, 'alphaPlot':False}
plotAGDDictStats(stDict)
elif iseqPolicy is None and mtmGamma is not None:
u = []
stats = []
ssPlcyList = []
algoList = []
hyperP = hosgdHyperFunAGD(OptProb, ssPolicy=ssPolicy, mtmGamma=mtmGamma)
sol = hosgdMTM(OptProb, nIter, alpha, hyperP)
u.append(sol[0])
stats.append(sol[1])
ssPlcyList.append( ssPolicy )
algoList.append('Momentum')
stDict = {'stats': stats, 'ssPlcy': ssPlcyList, 'alphaVal': alpha, 'algoList': algoList, 'alphaPlot':False}
plotAGDDictStats(stDict)
elif iseqPolicy is not None and mtmGamma is None:
u = []
stats = []
ssPlcyList = []
algoList = []
hyperP = hosgdHyperFunAGD(OptProb, ssPolicy=ssPolicy, iseqPolicy=iseqPolicy)
sol = hosgdNTRV(OptProb, nIter, alpha, hyperP)
u.append(sol[0])
stats.append(sol[1])
ssPlcyList.append( ssPolicy )
algoList.append('Nesterov')
stDict = {'stats': stats, 'ssPlcy': ssPlcyList, 'alphaVal': alpha, 'algoList': algoList, 'alphaPlot':False}
plotAGDDictStats(stDict)
return u, stats
def plotAGDDictStats(stDict):
stats = stDict.get('stats')
ssPlcy = stDict.get('ssPlcy')
alpha = stDict.get('alphaVal')
algoName = stDict.get('algoList')
alphaPlot = stDict.get('alphaPlot')
# --- Plot cost function ---
PLT.figure()
for n in range(len(stats)):
PLT.semilogy(stats[n][:,1], label=r'$\alpha_k$ : {0} -- {1}, {2}'.format(alpha, algoName[n], ssPlcy[n].txt) )
PLT.legend(loc='upper right')
PLT.ylabel(r'$f(x) = \frac{1}{2}\| A \mathbf{x} - \mathbf{b} \|_2^2$', fontsize=16)
PLT.xlabel('Iteration', fontsize=16)
PLT.title('Cost functional',fontsize=16)
# --- Plot SS ---
if alphaPlot:
PLT.figure()
for n in range(len(stats)):
PLT.plot(stats[n][1::,2], label=r'$\alpha_k$ : {0}'.format(ssPlcy[n].txt) )
PLT.legend(loc='upper right')
PLT.ylabel(r'$\alpha$', fontsize=20)
PLT.xlabel('Iteration', fontsize=16)
PLT.title('Step-size',fontsize=16)
# ---
PLT.show()
Simple Simulation
import numpy as np
import HoSGDlabAGD as H
import HoSGDdefs as hosgdDef
# run defualt sim: compare GD, MTM and NTRV
u, st = H.exQlinAGD(40, 0.01, N=500, M=2000)